Bifurcaciones: primer pantallazo
Intoducción
Los sistemas que vimos hasta ahora en una dimensión eran relativamente sencillos y con pocas chances de representar sistemas físicos realistas. Sin embargo presentan algunos aspectos remarcables. El primero de ellos es el cambio cualitativo de las soluciones cuando se cambian los parámetros.Los parámetros son magnitudes que se cambian lentamente por medio de un agente externo.
Los cambios cualitativos que mencionamos se denominan bifurcaciones, concepto fundamental en los sistemas nolineales. Comenzaremos con la bifurcación de nodo-silla que de alguna forma es la más famosa.
1. Bifurcación nodo-silla
Esta bifurcación representa el mecanismo básico de creación y destrucción de puntos fijos.
Consideremos un sistema dado por

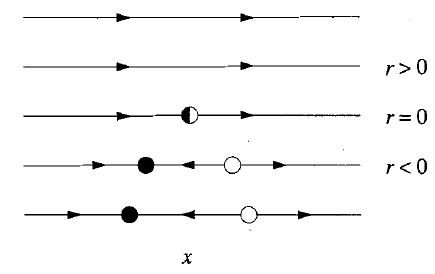
donde  es un parámetro de control que da cuenta de una variación del sistema inducida por un mecanismo externo. Esta variación se supone que está dada y es mucho más lenta que las escalas propias del sistema. Cuando
es un parámetro de control que da cuenta de una variación del sistema inducida por un mecanismo externo. Esta variación se supone que está dada y es mucho más lenta que las escalas propias del sistema. Cuando  es fácil ver que hay 2 puntos fijos uno estable y el otro inestable. A medida que tiende a
es fácil ver que hay 2 puntos fijos uno estable y el otro inestable. A medida que tiende a  por la izquierda los puntos fijos se van acercando hasta que en el caso límite de
por la izquierda los puntos fijos se van acercando hasta que en el caso límite de  colapsan en un punto fijo que es semi-estable (es decir, estable frente a perturbaciones en una dirección e inestable en la otra). Para
colapsan en un punto fijo que es semi-estable (es decir, estable frente a perturbaciones en una dirección e inestable en la otra). Para  ya no quedan puntos fijos. Decimos que en ocurrió una bifurcación de nodo-silla. Como decíamos antes el sistema cambia cualitativamente en dicho valor de .
ya no quedan puntos fijos. Decimos que en ocurrió una bifurcación de nodo-silla. Como decíamos antes el sistema cambia cualitativamente en dicho valor de .
Gráficamente se puede ver de la siguiente forma

Una representación muy útil de las bifurcaciones se obtiene por medio de los diagramas de bifurcaciones donde se representan las soluciones de equilibrio (en este caso los puntos fijos)

usualmente las soluciones estables se grafican punteadas y las estables continuas.
Otra representación es:
Formas normales:
Todas las bifurcaciones tienen asociada una forma genérica de expresarlas denominada forma normal. En el caso de la nodo-silla dado un sistema
,")
la forma normal se escribe como
 + b (x- x^*)^2+ ...")
donde
 y
y 
Esta bifurcación es de alguna forma la más corriente de todas.
El tema formas normales es muy amplio, se puede encontrar más información en Guckenheimer y Holmes (1983).
2. Bifurcación transcrítica
En muchas sistemas se da que un punto fijo existe para todos los valores de un parámetro, por ejemplo en la ecuación logística la solución nula existe siempre por más que en ciertas situaciones es inestable. La bifurcación transcrítica es el mecanismo estándar de intercambio de estabilidad.
Partimos de una ecuación del tipo

se puede ver que la solución  siempre existe, además para tenemos otro punto fijo (inestable) negativo, mientras que para tenemos además de un punto fijo (estable) positivo.
siempre existe, además para tenemos otro punto fijo (inestable) negativo, mientras que para tenemos además de un punto fijo (estable) positivo.

El diagrama de bifurcaciones resulta

3. Bifurcación de tridente (u horquilla)
En este caso consideramos un sistema físico que tenga una simetría, en esta caso una simetría izquierda derecha (si cambiamos  por
por  el sistema no cambia).
el sistema no cambia).
Algo que aún no dijimos es que las bifurcaciones pueden clasificarse según el término de mayor orden en supercríticas o subcríticas.
En este caso empezamos con la supercrítica, La forma normal es del tipo

se puede ver que la solución siempre existe. Para esta solución es estable. Por otro lado para la solución cambia su estabilidad y aparecen dos nuevos puntos fijos simétricos (ambos estables).

El diagrama de bifurcaciones resulta

Ejemplo
Consideramos el sistema  . Mostramos que este sistema tiene una bifurcación de horquilla supercrítica en
. Mostramos que este sistema tiene una bifurcación de horquilla supercrítica en  y
y  .
.
Graficamente se puede mostrar que el sistema tiene 1, 1 doble o 3 puntos fijos según el valor de  .
.

Si graficamos los puntos fijos en función de

El punto de bifurcación se puede encontrar numéricamente.
Bifurcación de horquilla subcrítica.
Consideramos ahora el caso que el término de mayor grado tiene signo positivo

El diagrama de bifurcaciones tiene el siguiente aspecto

En los sistemas físicos reales tiene que haber un mecanismo que impida que determinada variable crezca indefinidamente.


Se producen "saltos" e "histéresis".

4. Bifurcación imperfectas y catástrofes
Consideramos un parámetro  que viene de la imperfección de la bifurcación;
que viene de la imperfección de la bifurcación;
